ZLTECH 24V-48V DC 30A CAN RS485 servo kaʻa kaʻa kaʻa hoʻokele no ka mīkini CNC





He ʻāpana koʻikoʻi ka mea hoʻokele Servo o ka mana neʻe o kēia manawa a hoʻohana nui ʻia i nā lako automation, e like me nā robots ʻenehana a me nā kikowaena mīkini CNC.ʻO ka ʻenehana hoʻokele Servo, ʻo ia kekahi o nā ʻenehana koʻikoʻi no ka mālama ʻana i nā mīkini mīkini CNC, nā robots ʻenehana a me nā mīkini ʻenehana ʻē aʻe, ua loaʻa i ka nānā nui i nā makahiki i hala.
Hoʻohana ka mea hoʻokele servo i kahi kaʻina hana hōʻailona kikohoʻe (DSP) ma ke ʻano he kumu hoʻomalu, hiki ke ʻike i nā algorithms mana paʻakikī, a ʻike i ka digitization, networking a me ka naʻauao.I ka manawa like, loaʻa iā ia ka ʻike hewa a me nā kaapuni pale e pili ana i ka overvoltage, overcurrent, overheating, undervoltage, a me nā mea ʻē aʻe.
Hoʻokaʻawale ʻia ka mana hoʻokele servo i ka loop position, velocity loop a me ka loop current e like me kāna mea hoʻomalu mai waho a i loko.Hiki i ka mea hoʻokele servo ke kākoʻo i ke ʻano hoʻomalu kūlana, ke ʻano hoʻokele velocity a me ke ʻano mana torque.Hiki ke hāʻawi ʻia ke ʻano hoʻokele hoʻokele ma nā ʻano ʻehā: 1. Analog quantity setting, 2. Internal setting of parameter setting, 3. Pulse + direction setting, 4. Communication setting.
ʻO ka hoʻohana ʻana i ka hoʻonohonoho kūloko o ka hoʻonohonoho hoʻonohonoho ʻana he liʻiliʻi, a ua kaupalena ʻia a hoʻoponopono ʻia.
ʻO ka maikaʻi o ka hoʻohana ʻana i ka hoʻonohonoho helu analog he pane wikiwiki.Hoʻohana ʻia ia i nā manawa kiʻekiʻe kiʻekiʻe a pane kiʻekiʻe.ʻO kona hemahema ʻo ia ka zero drift, kahi e lawe mai ai i nā pilikia i ka debugging.Hoʻohana nui nā ʻōnaehana servo ʻEulopa a me ʻAmelika i kēia ala.
Hoʻopili ʻia ka mana o ka Pulse me nā ʻano hōʻailona maʻamau: CW/CCW (pulse maikaʻi a maikaʻi ʻole), pulse/direction, A/B phase signal.ʻO kona hemahema ka pane haʻahaʻa.Hoʻohana nui nā ʻōnaehana servo Iapana a me Kina i kēia ala.
ʻO ka hoʻonohonoho kamaʻilio ʻana ke ʻano hoʻokele maʻamau i hoʻohana ʻia i kēia manawa.ʻO kāna mau mea maikaʻi ʻo ka hoʻonohonoho wikiwiki, pane wikiwiki, a me ka hoʻolālā neʻe kūpono.ʻO ke ʻano maʻamau o ka hoʻonohonoho kamaʻilio ʻana ʻo ke kamaʻilio kaʻa kaʻa, kahi e maʻalahi ai ke kelepona, a hāʻawi pū ka protocol diversified communication i nā mea kūʻai aku i nā koho hou aʻe.
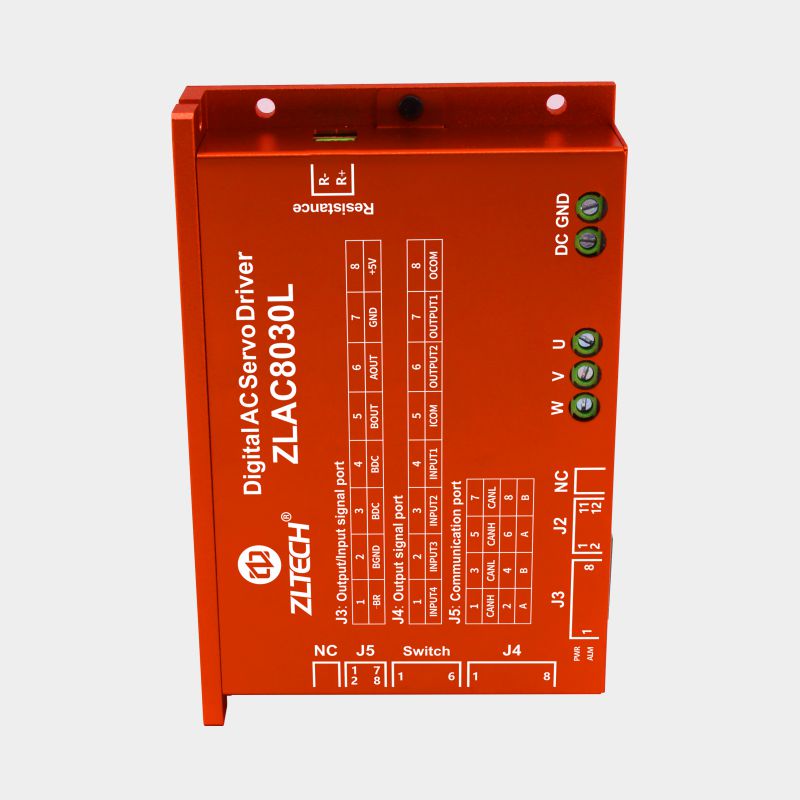
ʻO ZLAC8030 kahi mea hoʻokele servo digital kiʻekiʻe a haʻahaʻa haʻahaʻa i hoʻomohala kūʻokoʻa e lākou iho.He ʻano maʻalahi kona ʻōnaehana a me ka hoʻohui kiʻekiʻe.Hoʻohui ia i ke kamaʻilio kaʻa kaʻa a me nā hana hoʻokele hoʻokahi-axis.Hoʻohālikelike ʻia ia me nā mīkini servo 500W-1000W.
Nā ʻāpana
| INOA MEA KŪʻAI | HOOLAHA SERBO |
| P/N | ZLAC8030L |
| VOLTAGE Hana (V) | 24-48 |
| KA WAIWAI HOU (A) | 30A, MAX 60A |
| KE KANAKA KAUKA | KANOPEN, RS485 |
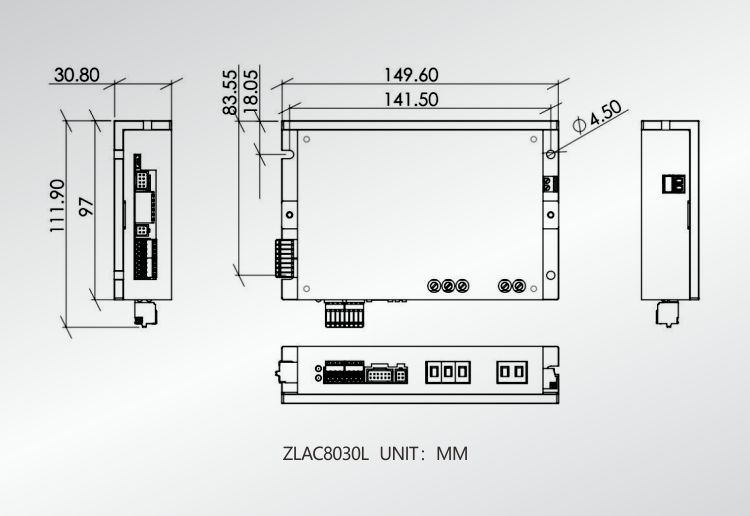
| DIMENSION(mm) | 149.5*97*30.8 |
| HUB SERVO MOTOR | MOTOR HANA KIEKIE |
Anana
Palapala noi

Hoʻopili

Mea Hana Hana & Nānā

ʻO ka hōʻoia a me ka hōʻoia

Keena & Hale Hana

Ka launa pū ʻana

Māhele huahana
-

ZLTECH 3 ʻāpana 60mm Nema24 24V 100W/200W/300W/40...
-

ZLTECH 42mm 24V 1.5A 0.5Nm CANopen i hoʻohui ʻia ...
-

ZLTECH 6.5 iniha 24V-48V 150W 120kg BLDC uila...
-

ZLTECH 9.5inch 48V 20N.m hub kaʻa no ka mahiʻai ...
-

ZLTECH Nema23 encoder CANopen i hoʻohui ʻia i nā ʻanuʻu...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V i hoʻohui pū ʻia...





